We set out to create an animated mini-animal avatar in Processing. The concept was to encourage the user to experience a degree of transference to another type of being. Initially we were considering a quadruped - like a polar bear. But contemplating our hands we switched to an octopus because the look and feel of our fingers undulating in air was ripe for this kind of transformation.
Doing a little background research; our project seems similar in its fundamental concept to to Karolina Sobecka's work with animal facial expressions.
Initially considering using the lerp() function in Processing we stumbled upon Keith Peter's elegant segmented arm. We spent a lot of time working to understand the sketch's trigonometry and structure so that we could manipulate it to suit our needs for our animation.
We created a wearable controller using a kitchen glove, gaffer's tape, two flex sensors and an Adafruit Flora microprocessor.

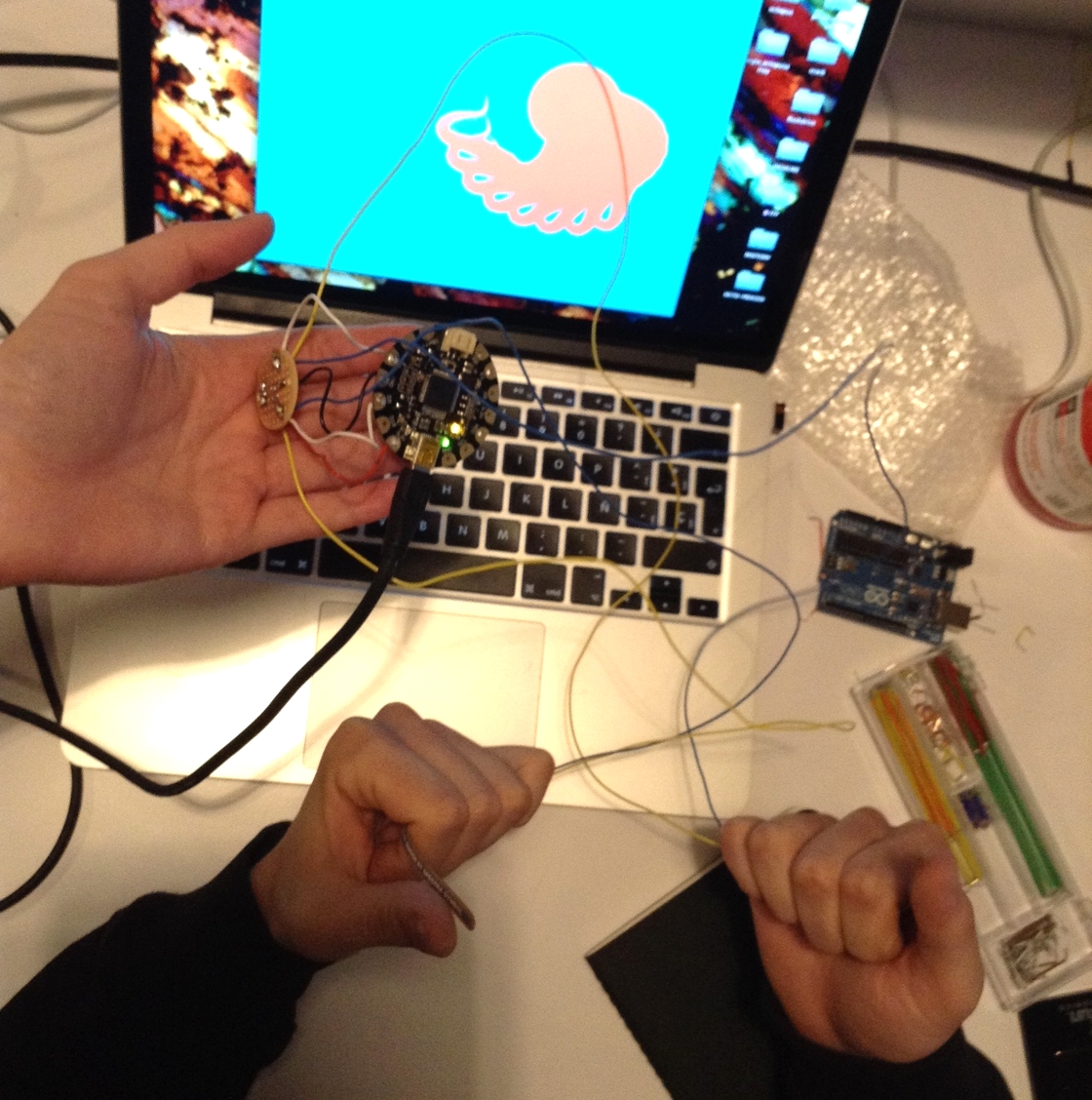
We tested a few iterations of our Interactive Octopus and it's physical interaction.
Here is a rough of our Flora circuit schematic. Originally we tweaked our sensor mapping with 5V power but since we were forced to use 3.3V we had to adjust our values - especially since we were dealing with sin/cos/atan values in our oscillating sketch objects.

Here is our Interactive Octopus in action.
Here is our Arduino code.

Here is our Processing code as modified from Keith Peters.



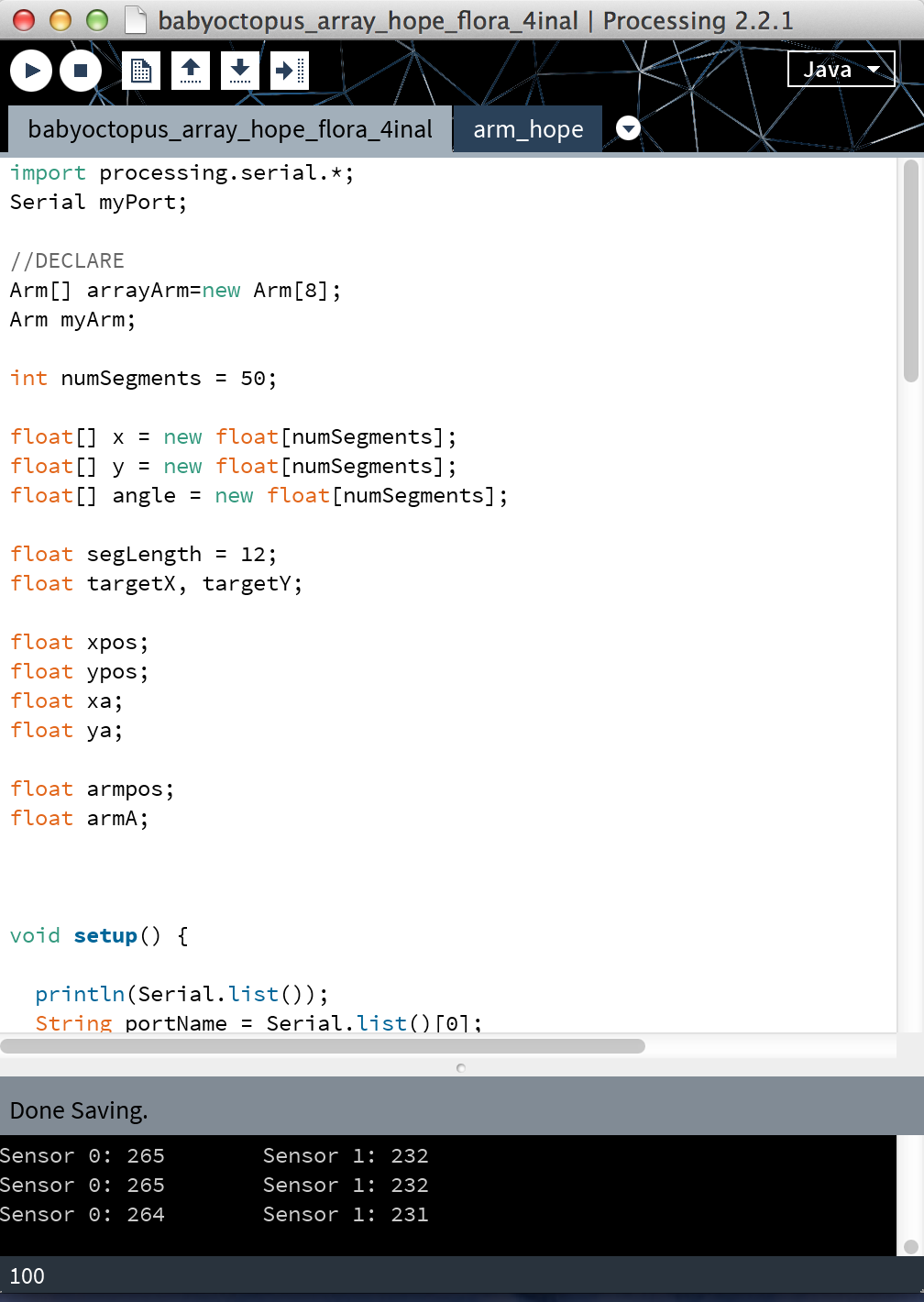



import processing.serial.*;
Serial myPort;
//DECLARE
Arm[] arrayArm=new Arm[8];
Arm myArm;
int numSegments = 50;
float[] x = new float[numSegments];
float[] y = new float[numSegments];
float[] angle = new float[numSegments];
float segLength = 12;
float targetX, targetY;
float xpos;
float ypos;
float xa;
float ya;
float armpos;
float armA;
void setup() {
println(Serial.list());
String portName = Serial.list()[0];
myPort = new Serial(this, "/dev/tty.usbmodem1411", 9600);
myPort.bufferUntil('\n');
//noCursor();
size(1440, 900);
//INITIALIZE
myArm = new Arm();
for (int t=0; t<arrayArm.length; t++) {
arrayArm[t]=new Arm();
}
}
void draw() {
background(0, 180, 195);
fill(255, 120, 90);
//ellipse(width*3/5, height*2/5, 220 + 10*sin(millis()/100), 220 + 10*cos(millis()/100));
for (int t=0; t<arrayArm.length; t++) {
pushMatrix();
translate(width*4/6, height*2/5);
ellipse(width-width, height-height, 100 + 10*sin(millis()/100), 100 + 10*cos(millis()/100));
rotate (PI*t/13);
arrayArm[t].display();
for (int i=0; i<x.length; i++) {
arrayArm[t].segment(x[i], y[i], angle[i], (i+1)*2);
}
popMatrix();
}
myArm.reachSegment(0, xpos, ypos);
for (int i=1; i<numSegments; i++) {
myArm.reachSegment(i, targetX, targetY);
}
for (int i=x.length-1; i>=1; i--) {
myArm.positionSegment(i, i-1);
}
}
void serialEvent(Serial myPort) {
String myString = myPort.readStringUntil('\n');
if (myString != null) {
myString = trim(myString);
int sensors[] = int(split(myString, ','));
println();
if (sensors.length >1 ) {
xpos = map(sensors[0], 200, 988, PI/9, PI);
ypos = map(sensors[1], 190, 467, 293, 971 );
//armA = map(sensors[0], 115, 142, 0, height);
}
for (int sensorNum = 0; sensorNum < sensors.length; sensorNum++) {
print("Sensor " + sensorNum + ": " + sensors[sensorNum] + "\t");
}
}
}
class Arm {
//int sensorVal;
//int getSensorVal(){ return this.sensorVal; }
//int setSensorVal(int sensorVal){
//this.sensorVal = sensorVal; }
//
//for (int i = 0; i < mySensors.length; i++){
// myArmArray[i].setSensorVal(mySensors[i]);
//}
//CONSTRUCTOR
Arm() {
}
//FUNCTIONS
void pulseBody(){
fill(255, 120, 90);
//need to add accelerometer sensor values to body pulsing
}
void display(){
strokeWeight(20.0);
stroke(255, 120, 90);
//set (x,y) to zero to perform transform and then rotate
x[x.length-1] = width-width; // Set base x-coordinate
y[x.length-1] = height-height; // Set base y-coordinate
// x[x.length-1] = width/3; // Set base x-coordinate
// y[x.length-1] = height/2; // Set base y-coordinate
}
void positionSegment(int a, int b) {
x[b] = x[a] + cos(angle[a]) * segLength+xpos/2.0;
y[b] = y[a] + sin(angle[a]) * segLength - xpos/4.0;
}
void reachSegment(int i, float xin, float yin) {
float dx = xin - x[i];
float dy = yin - y[i];
angle[i] = atan2(dy, dx);
targetX = xin - cos(angle[i]) * segLength;
targetY = yin - sin(angle[i]) * segLength;
}
void segment(float x, float y, float a, float sw) {
strokeWeight(sw);
pushMatrix();
translate(x, y);
rotate(a);
line(0, 0, segLength, 0);
popMatrix();
}
}